I performed my internship at the University of Salford (Greater Manchester area) at the Human Movement Technologies and Rehabilitation Research Group. At this research group they are conducting a research in stability in walking aid users. The experiments for this research require the usage of pressure sensors under the feet and walking aid as well as a motion capture system. Unfortunately, the usage of a motion capture system means that the experiments are hard to perform outside of a lab environment. However, performing the experiments in a lab setting required a lot of work to acquire enough (usually very frail) participants. So in order to perform the experiments more easily they were looking for a more mobile replacement for the motion capture system. This was the project for my internship.
This internship can be divided into two parts. First, creating an overview of all the potential replacement technologies for the motion capture system and choosing one to continue with. And second, to create a proof of concept for the selected technology.
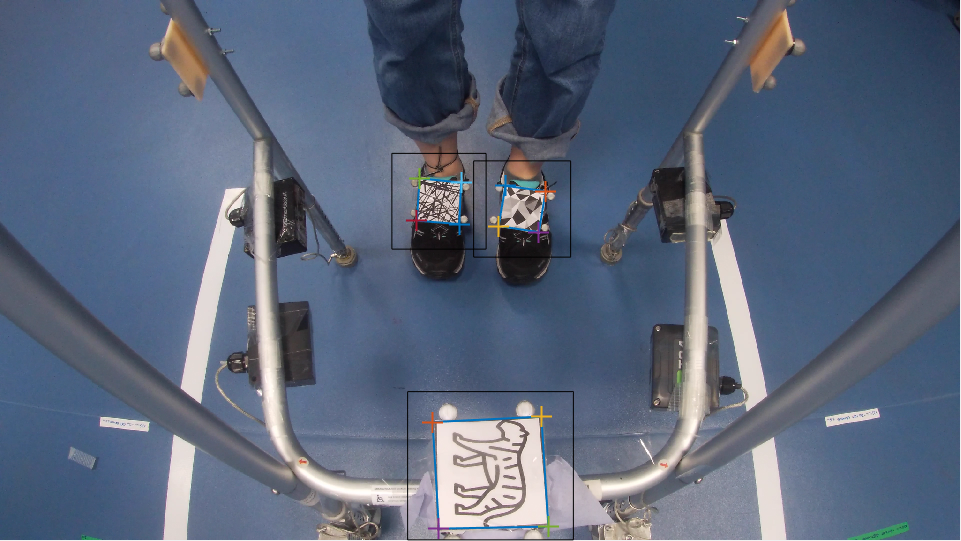
The chosen technology was a regular video recording using a GoPro camera, which could easily be attached to the walking frame and has built-in battery and storage. This, however, posed a serious challenge as the required positional data had to be in 3D, whereas the GoPro image is just 2D. This challenge was tackled using a pattern attached to the shoes with known dimensions. This pattern provided two benefits. First, it could be recognised by image recognition, removing the need to identify the more ambiguous “shoe”. Second, it provided a known size, which could then be used to determine the 3D position of the pattern (and the attached shoe).
The experimental results showed that the three-dimensional location of predetermined patterns on the shoes could be tracked with an average accuracy of 21 mm whilst feet were in the stance phase and an average accuracy of 93 mm whilst feet were in the swing phase. The latter might seem a lot, however the original research of the research group only required the position of the feet in stance phase. It was also shown that during ideal circumstances this average could be as low as 4.7 mm.
The image below shows a video frame as captured by the GoPro showing the recognised patterns as identified by the created algorithm.