Ik liep mijn stage aan de University of Salford (omgeving Manchester) bij de Human Movement Technologies and Rehabilitation Research Group. In deze onderzoeksgroep wordt onderzoek gedaan naar stabiliteit bij gebruikers van loophulpmiddelen. De experimenten voor dit onderzoek vereisen het gebruik van drukmeters onder de voeten en de loophulpmiddelen, evenals een motion capture-systeem. Helaas betekent het gebruik van een motion capture-systeem dat de experimenten moeilijk uit te voeren zijn buiten een laboratoriumomgeving. Het uitvoeren van de experimenten in een labsetting vereist echter veel werk om voldoende (meestal zeer kwetsbare) deelnemers te werven. Om de experimenten eenvoudiger uit te voeren, zochten ze naar een mobieler alternatief voor het motion capture-systeem. Dit was het project voor mijn stage.
Deze stage kan in twee delen worden verdeeld. Ten eerste het creëren van een overzicht van alle potentiële vervangingstechnologieën voor het motion capture-systeem en het kiezen van één technologie om verder mee te gaan. Ten tweede het creëren van een proof of concept voor de geselecteerde technologie. De gekozen technologie was een reguliere video-opname met een GoPro-camera, die gemakkelijk aan het looprek kon worden bevestigd en een ingebouwde batterij en opslag had. Dit vormde echter een serieuze uitdaging, aangezien de vereiste positionele gegevens in 3D moesten zijn, terwijl het GoPro-beeld slechts 2D is. Deze uitdaging werd aangepakt met behulp van een patroon dat aan de schoenen was bevestigd en bekende afmetingen had. Dit patroon bood twee voordelen. Ten eerste kon het worden herkend door beeldherkenning, waardoor de noodzaak om de meer ambiguë “schoen” te identificeren, verviel. Ten tweede bood het een bekende grootte, die vervolgens kon worden gebruikt om de 3D-positie van het patroon (en de schoen waaraan het vast zat) te bepalen.
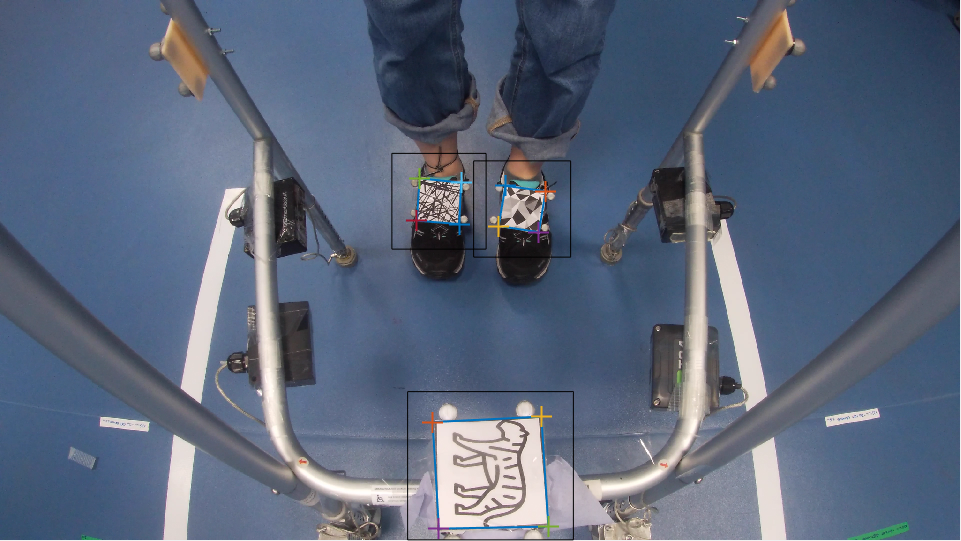
De experimentele resultaten toonden aan dat de driedimensionale locatie van vooraf bepaalde patronen op de schoenen kon worden gevolgd met een gemiddelde nauwkeurigheid van 21 mm terwijl de voeten in de standfase waren, en een gemiddelde nauwkeurigheid van 93 mm terwijl de voeten in de swingfase waren. Laatstgenoemde lijkt veel, maar het oorspronkelijke onderzoek van de onderzoeksgroep vereiste alleen de positie van de voeten in de standfase. Ook werd aangetoond dat onder ideale omstandigheden dit gemiddelde zo laag kon zijn als 4,7 mm. De onderstaande afbeelding toont een videobeeld dat is vastgelegd door de GoPro, met de herkende patronen zoals geïdentificeerd door het gemaakte algoritme.